逗游网:值得大家信赖的游戏下载站!
导航
 微信:doyo_game
微信:doyo_game

关注逗游
逗游网:值得大家信赖的游戏下载站!
发布时间:2022-05-06 09:25 来源:百度贴吧 作者:L1A1-F1
镜控无人机
收起镜控无人机,会分成【驱动核心组件】、【悬停组件】和【转向制动】这几个来讲,有了这几个组件就能顺畅的控制无人机,之后想要什么功能自己去弄就行。
镜控无人机的优势,就是能直观的知晓小范围空间内的信息,还能做到精确引导,这是导航终端做不到的。
而且镜控还带来了视野上的优势,种种优势加起来,让镜控无人机十分适合小型化,和入洞作业。
要实现镜控并不难,只需要用相关的组件把潜望镜的信号转化即可。
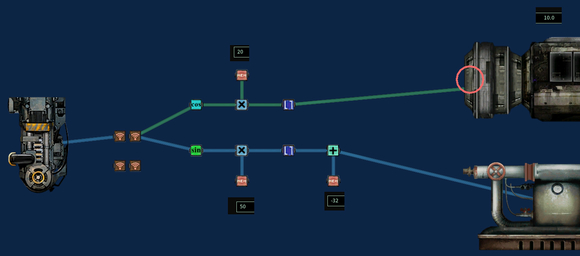
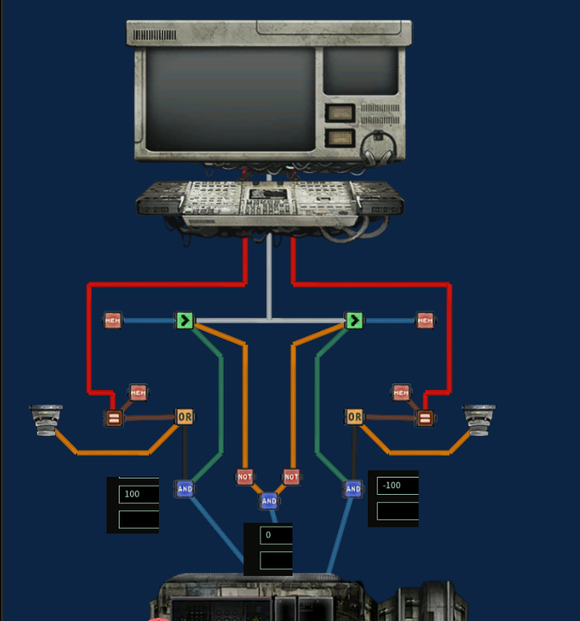
图中的数值,原本是X*100,再输出到目标。我写的数值是我自己摸索出来,属于既不慢又不快那种,操作手感很不错。
上一楼的图,属于镜控无人机的驱动组件,把潜望镜的信号转化成上下和水平移动的信号。
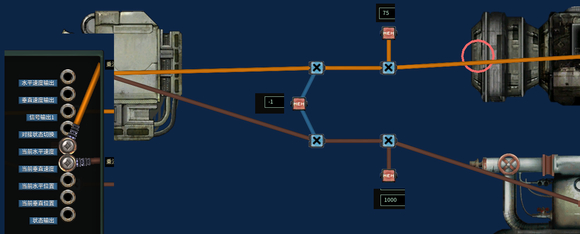
而这个,是属于无人机的制动/悬停组件,让无人机可以静止。
同样,原本上面的75应该是100,写成75是我个人的调整。
如果是熟悉镜控无人机,或者制造过镜控无人机的玩家来说,会知道这两个逻辑组组合起来的效果。
相应的,镜控无人机的控制模式,是:移动→停止→移动,来完成转向,也就是点对点式移动。
这是因为镜控无人机的制动推力大于驱动推力,导致无人机放开控制启动悬停时,能比持续控制更快停止。
但是,大多数新手并不懂得这个,而且就算写上说明,他们大概也不会去看 =。= (两个多月的测试里,这种情况时有发生。)
所以,我用自己弄出来的制动引擎,改成了利于无人机操作的制动引擎。
这就是制动引擎的原型,只要修改一下就能用在无人机上。
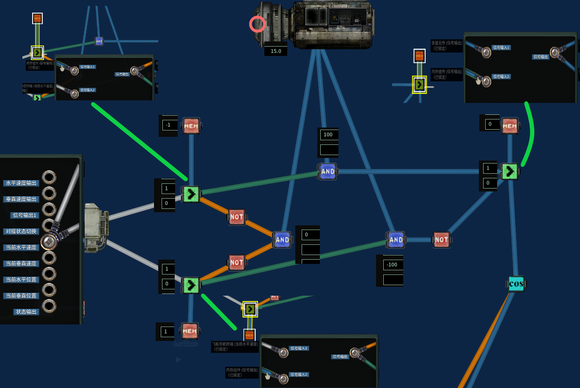
图中,余弦组件是源自于驱动的逻辑组,需要从哪里拉一条信号线。
右边那个比较元件,因为接线颜色问题不太明显,它的信号是源于余弦和内存组件,然后输出到中间的与逻辑和它左下角的否逻辑上。
这个逻辑组具体原理,就是通过两条判定来决定制动引擎是否启动。
比如,在无人机向右移动,且速度超过1时,当控制的指针拉到无人机的左边,就会启动制动引擎,让无人机立刻减速。
上一篇: 潜渊症如何灭火 自动灭火模组制作方法
下一篇: 盗贼遗产2天赋加点推荐 天赋优先点什么